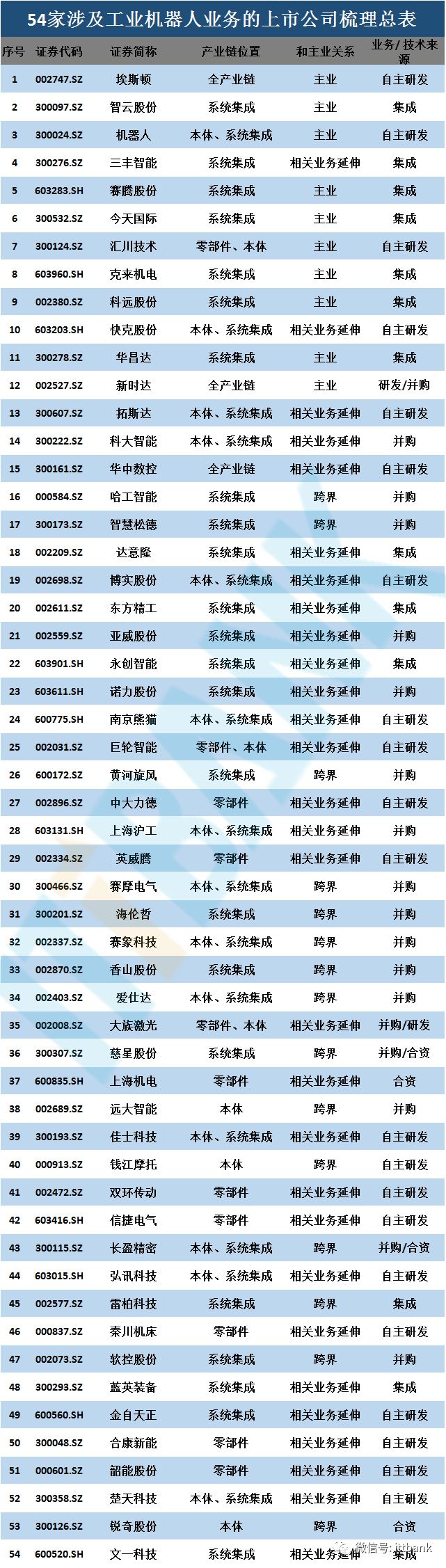
工业机器人产业链的构成

工业机器人产业链分为三个部分:上游、中游和下游。上游主要负责生产核心部件,比如减速器、控制系统和伺服系统等。这些部件对机器人的运作至关重要,是机器人实现各种功能的基础。只有将生产的机器人进行系统整合,我们才能将其应用于汽车、电子、金属加工等行业,满足客户的需求。
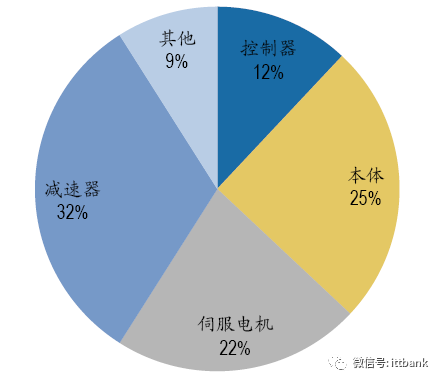
在工业机器人这一领域,核心部件的成本占了总成本的大约七成。具体来看,减速器占了三成二,伺服电机占了二成二,控制器占了剩下的十二分之一。这种分配比例显示出上游零部件制造在产业链中的关键作用,并且表明了零部件的成本和性能对工业机器人的推广和使用有着重要的影响。
机器人关节减速器的特点
机器人关节减速器与一般减速器不同,有其独特要求。它需要传动链条短小、体积小巧、动力充沛、重量轻便、操作简便。这些优点使得机器人在狭小空间内表现优异,并且能够适应各种复杂的工作场景。

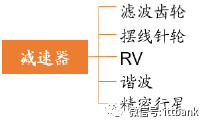
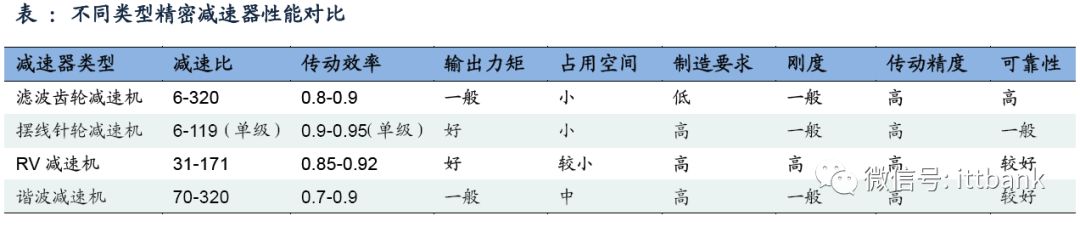
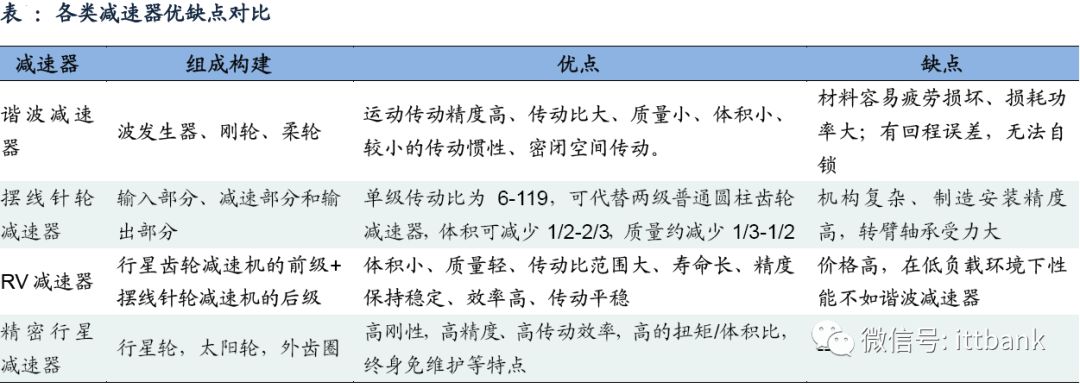
工业机器人所采用的精密减速机分为五种,每种在传动效率和减速比上各有特点。这样的分类使得机器人能针对不同应用环境进行调整,同时也满足了工业生产的多样化需求。


谐波减速器的优势与现状
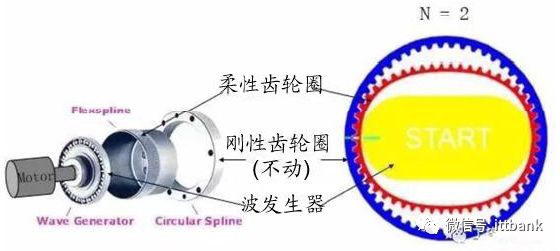
谐波减速器利用柔轮的弹性变化来传递动力,其显著优势在于传动比高且所需部件较少。因此,它在工业机器人行业中展现出广阔的应用潜力。
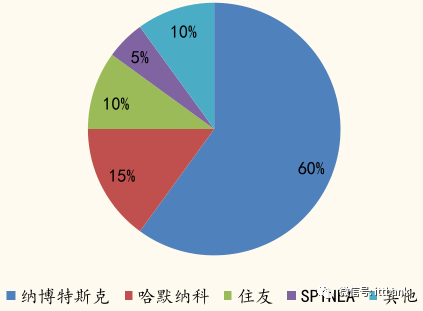
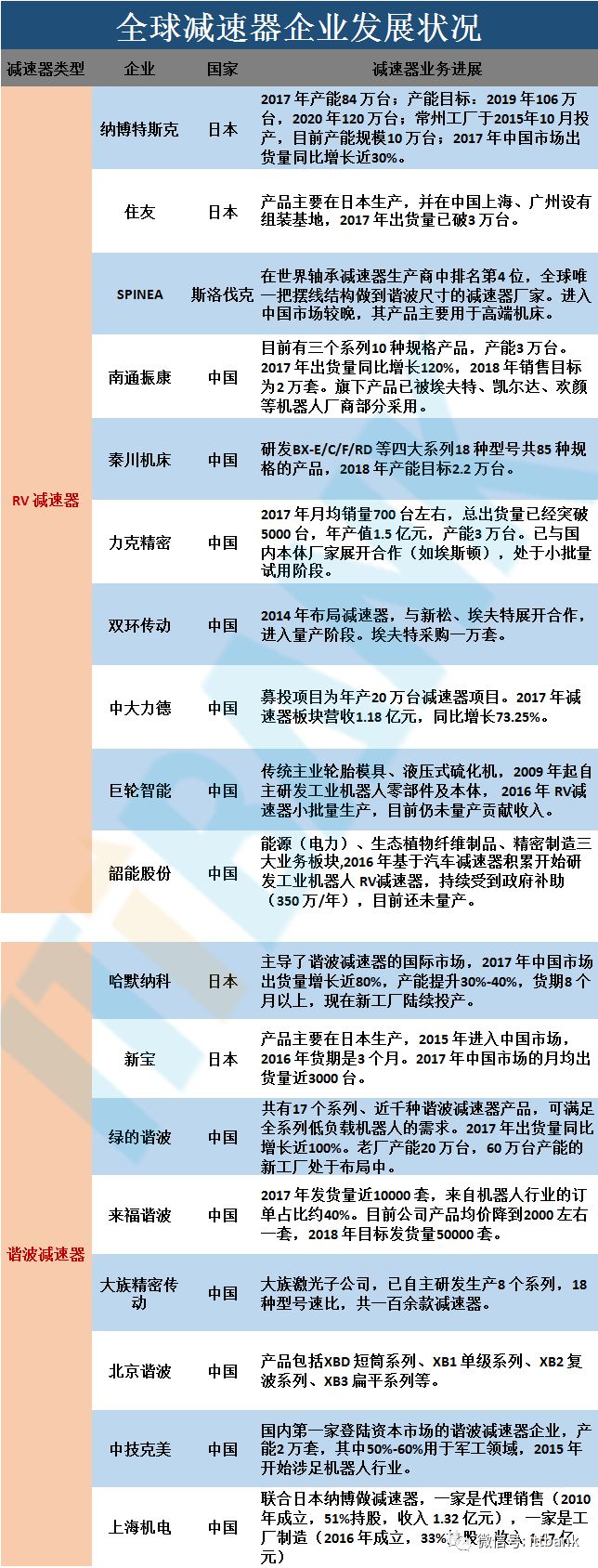
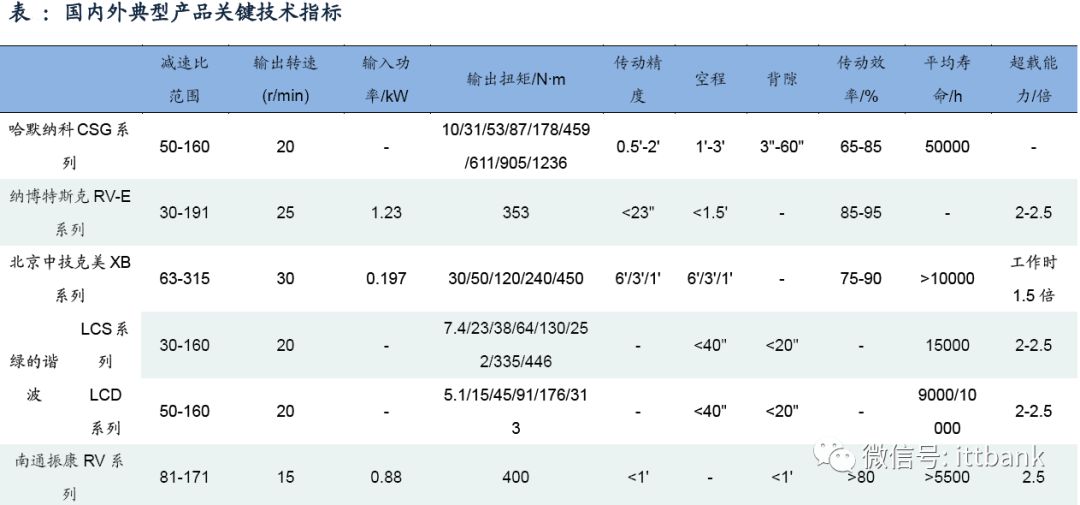
苏州绿的和中技克美的减速器在减速比上与日本哈默纳科的产品相当。这些减速器性能良好,满足了市场需求,并在国内机器人领域得到了广泛使用。这说明我国谐波减速器技术有了提升,对国产机器人产业起到了关键作用。
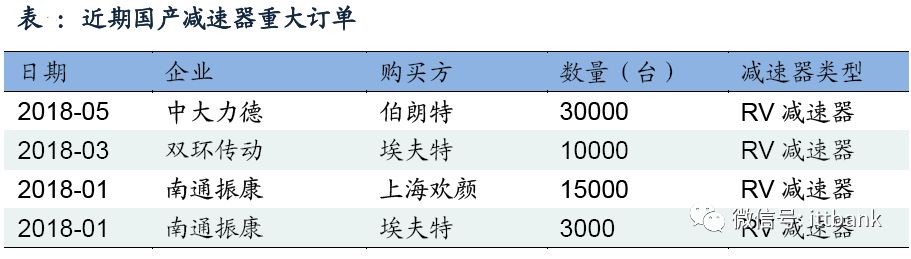
国产减速器的困境与突破
减速器在我国工业机器人成本降低方面扮演着关键角色。当前,我国在减速器研发中遇到不少挑战,比如技术难关多、资金投入不够等。尽管存在这些困难,产品质量仍在不断提升,有些关键性能指标已达到国际先进水平。
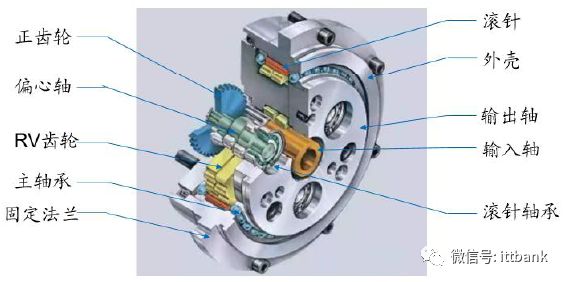
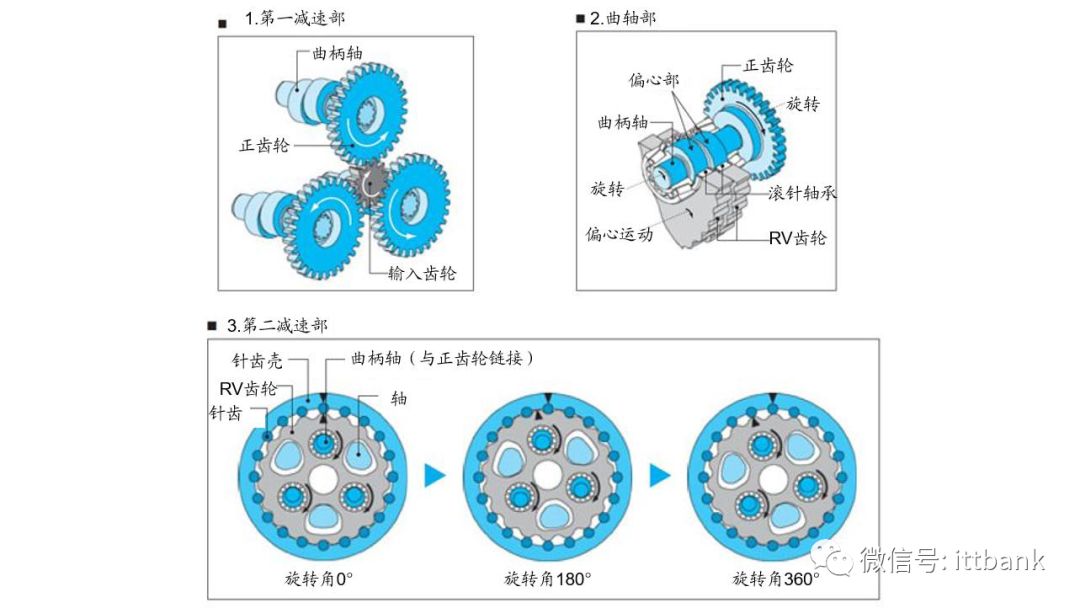
南通振康生产的RV减速机因其性价比高,吸引了众多国内企业的目光。新松机器人、埃夫特等知名企业已开始采用这种减速机。这一现象反映出,国产减速器正逐渐打破国外品牌的垄断,并在国内市场逐步站稳脚跟。
减速器市场测算与前景

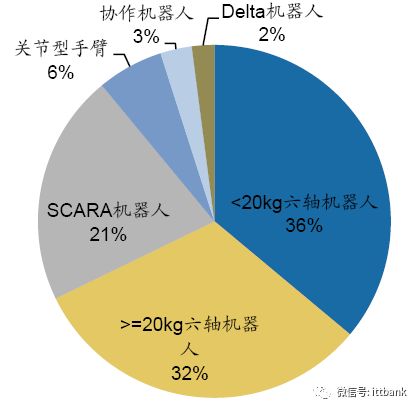
市场需求对于减速器未来的看法是合理的。IFR的预测表明,我们首先将未来工业机器人的需求分类,然后依据不同类别机器人对RV和谐波减速器的特定需求量,对市场的整体需求和发展潜力进行了预测。这种做法对行业发展起到了至关重要的指导作用。
未来,机器人部件技术将实现重大进展,我国工业机器人产业将步入快速发展阶段。在此过程中,伺服系统在机器人领域的应用将逐步增多,其应用范围将从机床领域拓展至机器人领域。这种转变预示着减速器市场和工业机器人市场具有巨大的成长空间。
核心零部件及系统集成现状
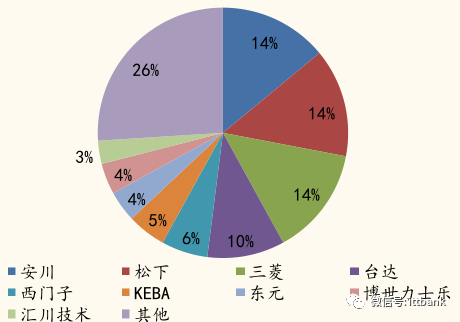
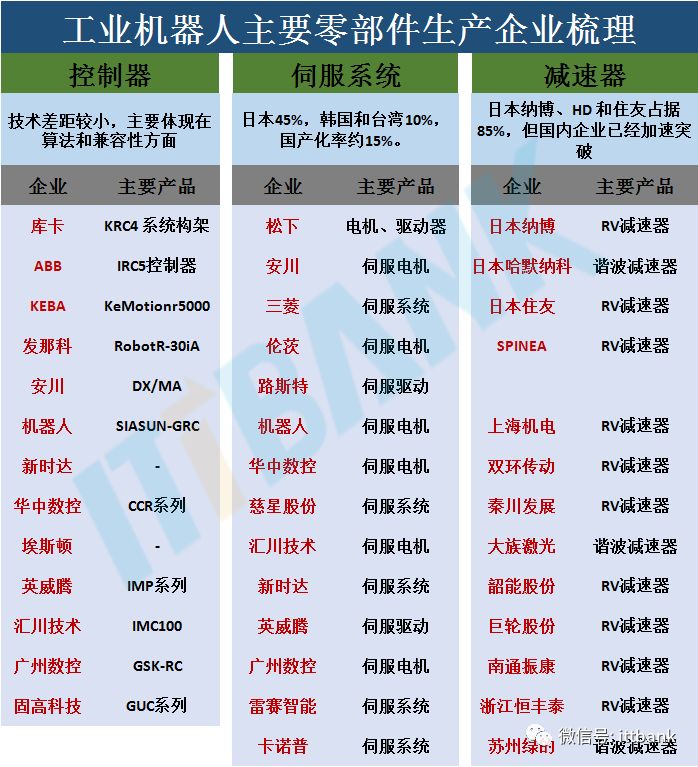
伺服电机对机器人关节的运作极为关键。关节数量增加,机器人的动作变得更加灵巧,并且精度也有所提高。所以,伺服电机的数量也相应地需要增加。以DSP控制器为例,它采用了模块化设计,以工业PC作为硬件基础,并且通过DSP控制卡来控制机器人的多个自由度,从而大大提高了运动控制的效能。
机器人的心脏部件,控制技术相对简单,我国厂家生产的机器通常能满足大多数功能需求。但问题在于,系统集成环节,大多数集成商仅负责设计和组装生产线,超过九成的原材料需从外部采购。这种依赖性使得生产线成本增加,在价格上不再具备优势。
我国自产的工业机器人能否彻底扭转国际知名品牌在市场上的领先地位,您有什么看法?如果这篇文章给您带来了启发,请不要忘记点赞和转发。

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.byysjy.com/html/tiyuwenda/9717.html